World’s first: 3D-printed magnetic microrobots delivering cells to precise locations in the body
In a world’s first, a team of researchers at City University of Hong Kong (CityU) has developed a magnetic 3D-printed microscopic robot that can carry cells to precise locations in live animals.
The invention could revolutionise cell-based therapy, regenerative medicine and more precise treatment for diseases such as cancer.
It was published in journal Science Robotics in June under the title “Development of a magnetic microrobot for carrying and delivering targeted cells”.
“This could be a huge leap for the emerging industry of cell surgery robotics,” said Professor Sun Dong, Head of the Department of Biomedical Engineering (BME) at CityU and the supervisor of the research team.
He hoped that the microrobots could be used to carry stem cells that can repair damaged tissues or treat tumours, providing an alternative to invasive surgery, as well as a solution for the side effects caused of drugs and drug resistance issues.
In recent years, scientists have been exploring the feasibility of using microrobots to deliver drugs or cells to specific part of the body. Magnetic fields were used to move the microrobots because of the precise positioning ability and insensitivity to biological substance. But the application was only limited to in vitro cell delivery, and it might not reflect feasibility in vivo situation due to the complexity inside multi-cellular organisms.
In this new study, the CityU research team has managed to design a magnetically driven microrobot which can achieve in vivo transport and delivery of targeted cell. “This is the first known instance of a microrobot able to deliver cells in a live body,” said Dr Li Jun-yang, PhD graduate of BME and the first author of the paper.
To design the microrobot, the researchers assessed the efficiency of different robot designs with computer simulations. They found out that a spherical structure can enhance magnetic driving capability and allow easy fusion of the microrobot with host tissues; a porous spherical structure can improve cell-carrying capacity; and the addition of a burr-like structure to the porous spherical structure can further enhance cell-carrying capacity.
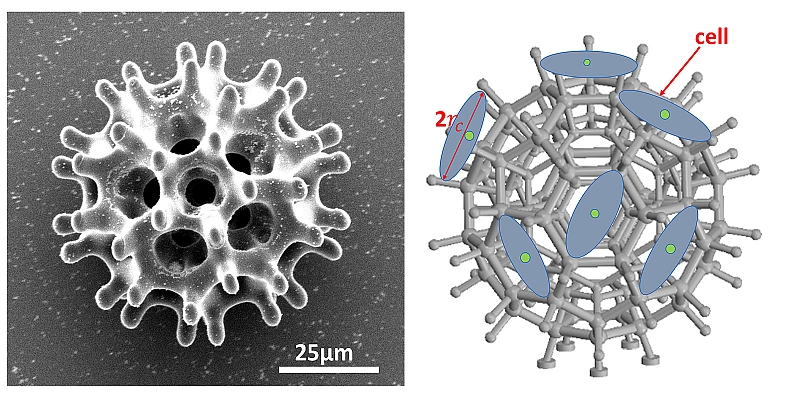
The size of the new microrobot is less than 100 micrometres (μm) in diameter, similar to that of a single strand of human hair. Using a negative photoresist SU-8 50, the team fabricated the microrobots with 3D laser lithography, and then coated them with nickel for magnetism and titanium for biocompatibility.
The microrobots are actuated by magnetic gradient force. The research team has designed and made an external electromagnetic coil actuation system to manipulate the magnetic microrobots to reach a desired site. After in vitro experiments, subsequent tests were carried out on two types of animals.
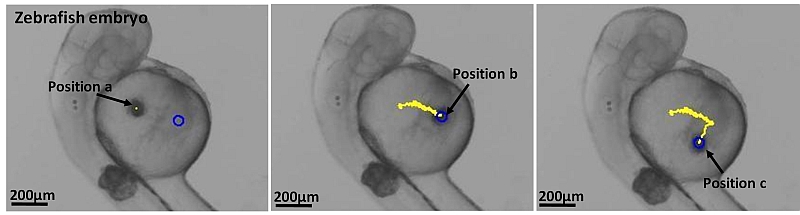
Since zebrafish has high genetic similarity to humans, and the yolk of its embryo is transparent for easy monitoring, the team used zebrafish embryo for vitro experiment. They loaded the microrobots with connective tissue cells and stem cells, injected them into zebrafish embryos, and managed to guide them to the desired location with magnetic field gradient.
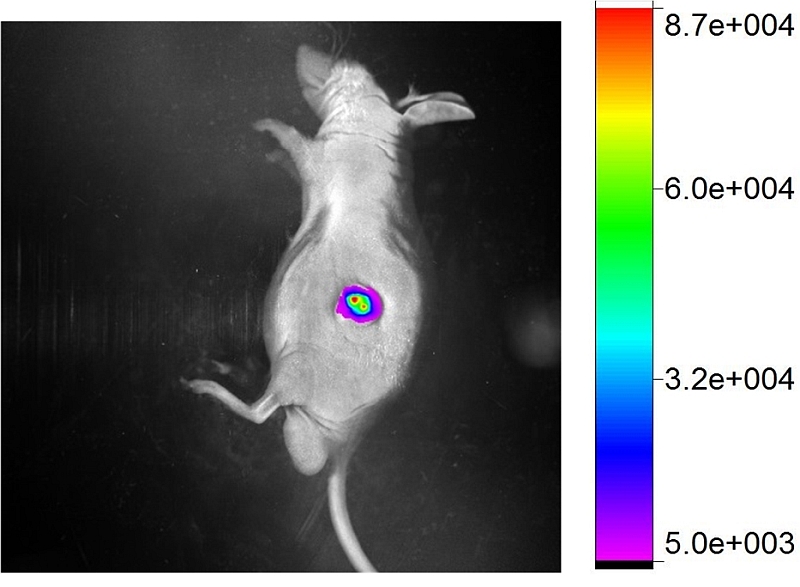
In addition, microrobots carrying fluorescent cancer cells were injected into laboratory mice to verify whether the cells can be released spontaneously from the microrobots to the targeted site. Cancer cells were used in the experiment because they could be easily detected after forming a tumor. The team found out that the fluorescent cells were successfully transported to the targeted area, passed through the blood vessels and released to the surrounding tissue.
Currently, the team is conducting a pre-clinical study on delivering stem cells into animals for the precise treatment of liver cancers. Clinical studies on humans are expected to take place in two to three years.
“The research could not have been a success without the grit and determination of our scientists. This is also a perfect example of interdisciplinary collaborations at CityU,” said Professor Sun.
It took the team ten years to overcome the challenges in different disciplines such as biomedical sciences, nanotechnology and robotics.
Led by BME, researchers in this project include Professor Sun; co-first authors Dr Li Jun-yang and Dr Li Xiao-jian; PhD students Mr Luo Tao and Mr Li Dong-fang; Dr Wang Ran, Dr Liu Chi-chi, Dr Chen Shu-xun (all of them are CityU PhD graduates); together with Professor Cheng Shuk Han, Associate Dean (Learning & Teaching), College of Veterinary Medicine and Life Sciences; and Dr Yue Jian-bo, Associate Professor of Department of Biomedical Sciences.