仿生機器人展示新發現的魟魚精子獨特“泳姿”!
普遍認為,精子透過拍打或者旋轉其柔軟的尾巴而“游動”。不過,由香港城市大學(城大)科學家領導的一支研究團隊就發現,魟魚(ray)的精子與別不同,是倚靠同時轉動尾部和頭部來移動。團隊進一步研究了其移動的運動模式,并以機器人展示。他們的研究成果,拓闊了科學界對微生物移動模式的認識,并為機器人的工程設計提供靈感。
這項研究由城大生物醫學工程學系(BME)副教授申亞京博士,與生物醫學系(BMS)助理教授史家海博士共同領導。研究結果已發表在科學期刊《美國國家科學院院刊》(Proceedings of the National Academy of Sciences of the United States of America, PNAS )上,題為〈Self-adaptive and efficient propulsion of Ray sperms at different viscosities enabled by heterogeneous dual helixes〉。
意外的發現

這次研究發現了原來魟魚精子具有一種全新、而且奇特的移動模式,團隊稱之為“異質雙螺旋模型”(Heterogeneous Dual Helixes (HDH) model)。專門研究不同生物治療的史博士說:“這其實是個意外的發現。”
一切要從團隊的另一項研究說起:研發人工授精技術以養殖鯊魚和魟魚等軟骨魚類(cartilaginous fishes, 牠們的骨骼全部或大部分由軟骨組成)的研究。史博士說:“軟骨魚可以用作‘工廠’,生產對抗例如COVID-19等疾病的抗體,所以我們想開發人工授精技術,用于高價值的水產養殖。”
在過程中,團隊在顯微鏡下首次觀察到魟魚精子的獨特結構和游動模式,令他們大感驚訝。他們發現魟魚精子的頭部并不是圓的,反而呈長型螺旋狀結構,并在游泳時頭部會隨著尾巴旋轉。
團隊進一步研究魟魚精子推進的機制,尤其是頭部在移動時的確實作用。他們發現魟魚精子由不同的螺旋狀部分所組成:精子螺旋頭部剛硬,尾巴則柔軟,連接兩者的中段部分則為旋轉運動提供能量。魟魚精子的頭部不僅“盛載”遺傳物質,還會與柔軟的尾巴一起推進精子移動。
能量效率高的HDH推進模式
為更深入了解這種運動模式,團隊分析了大量的魟魚精子游動數據,并從納米尺度觀察精子的內部結構。由于魟魚精子在游動時,頭部和尾部會以不同的旋轉速度和幅度向同一方向旋轉,因此團隊將該運動模式命名為異質雙螺旋(heterogeneous dual helixes, HDH)推進。
按團隊的統計分析,大約31%的總推動力是來自來頭部,是在所有已知精子中,首次發現有精子的頭部具推進力。由于魟魚精子頭部具推動力,使其運動效能高于其他僅靠尾部驅動的精子的物種,包括小體鱘(sterlet)和公牛等。
專門研究機器人技術與微/納米操控的申博士解釋說:“這種非傳統的推進方式,不僅令魟魚精子在不同粘度的環境均呈現出高度的適應能力,亦帶來卓越的運動能力和效率。”
高度的環境適應能力
環境適應能力在物競天擇中可謂是至關重要。魟魚精子的頭部和尾部可以按環境粘度,調整其移動和推進力,并以不同的速度向前游。因此,魟魚精子可以在不同粘度的多種環境中移動,展現出很高的環境適應能力。
魟魚精子在高粘度溶液中移動的速度僅下降26%,而其他物種精子的移動速度通常會下降超過40% 。(影片來源:DOI number: 10.1073/pnas.2024329118)
研究團隊更發現魟魚精子具獨特的雙向游動能力,即是不單可以向前游,更可以向后游。這種能力為精子于自然環境中,尤其是當遇到障礙時,提供了優勢。而其他頭部呈球形或棒狀的精子,則無法做到雙向移動。
魟魚精子展示出不同的游動方式,包括游向前、轉方向以及向后游。(影片來源:DOI number: 10.1073/pnas.2024329118)
受惠于HDH模式,螺旋狀的頭部亦為魟魚精子帶來了主動轉方向的能力。由于頭部和尾部都參與推進,兩者之間的角度會在身體產生側向力(lateral force),令魟魚精子可以轉方向,運動的靈活性很高。
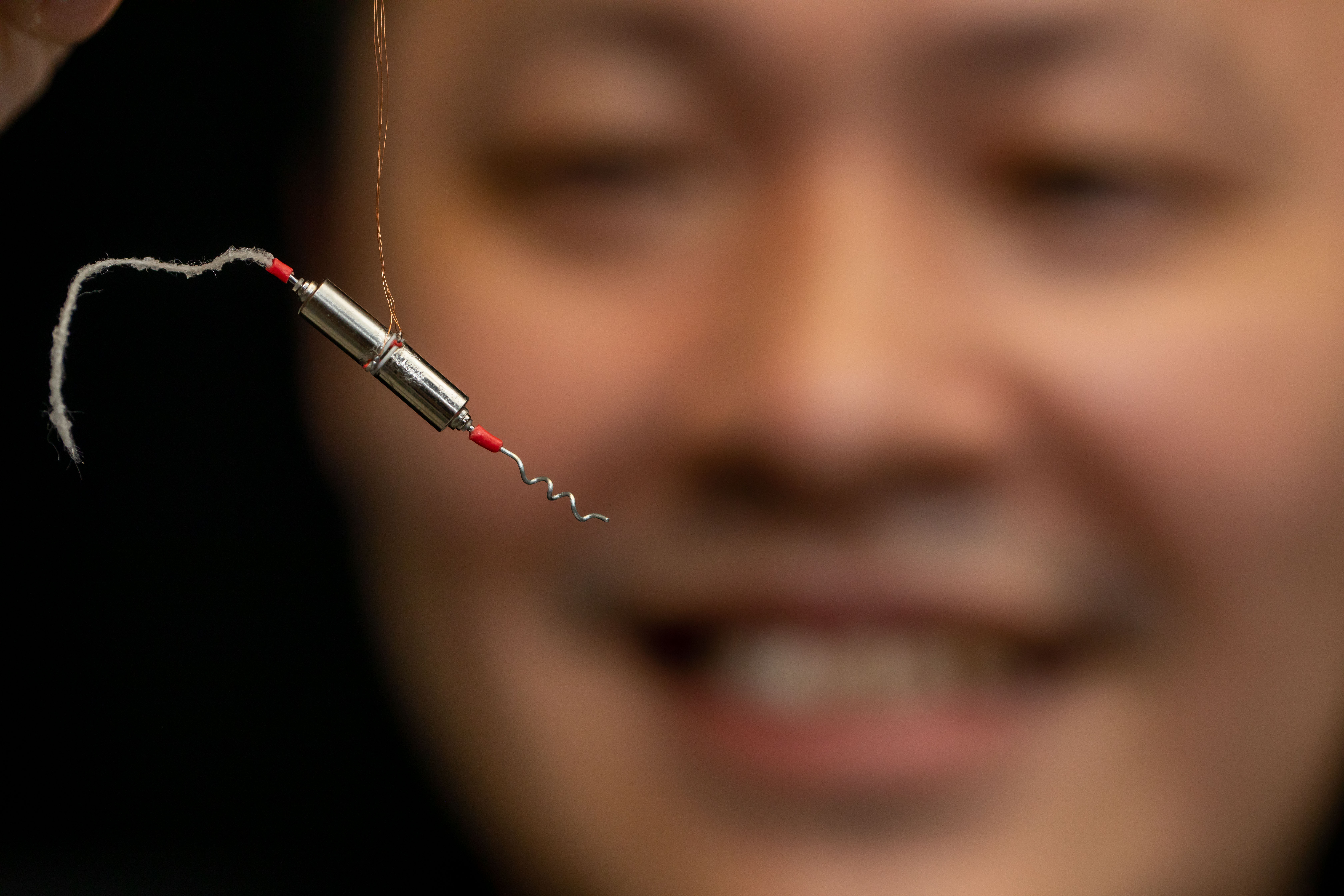
用仿生機器人展示HDH模式
魟魚精子獨特的HDH模式在活動能力和效率上,展現出多種特征,因而激發了團隊設計微型機器人的靈感。他們仿照魟魚精子結構而制成同樣具有剛硬螺旋形頭部和柔軟尾巴的仿生機器人,在相同功率輸入的情況下,于適應能力和效率方面,都較傳統機器人優勝;而且即使粘度出現變化,仿生機器人也能在液體環境中靈活移動。

這些優勝特點,為日后設計游泳機器人,以應付高難度的工程任務和生物醫學上的應用(例如于人體內部復雜液體環境和血管內),帶來了啟示。
仿生機器人能在液體環境中靈活移動。(影片來源:DOI number: 10.1073/pnas.2024329118)
申博士總結說:“我們相信了解這種獨特的推進方式,將顛覆有關微生物運動的認識,有助我們理解天然受精,并為設計應用于粘性環境的仿生機器人提供靈感。”
申博士和史博士均是這篇論文的共同通訊作者。第一作者是來自申博士團隊的王盼冰博士,以及來自史博士團隊的M. A. R. Al Azad博士。其他共同作者包括城大BME博士生楊雄,和香港海洋公園的研究人員。
研究獲得國家自然科學基金會、香港醫療衞生研究基金、香港研究資助局、深圳市科技創新委員會、深圳市醫療衛生三名工程以及董氏生物醫學研究中心的資助進行。
DOI number: 10.1073/pnas.2024329118
本文已于 “香港城大研創” 微信公眾號發布。
Wechat ID: CityU_Research
