城大研發(fā)全新人工智能系統(tǒng)可提升自動駕駛預(yù)測準(zhǔn)確性
車輛要保持安全的自動駕駛,精確、實時地預(yù)測附近車輛及行人的未來動向至關(guān)重要。香港城市大學(xué)(城大)領(lǐng)導(dǎo)的研究團(tuán)隊,最近研發(fā)出一套全新人工智能系統(tǒng),可增加自動駕駛系統(tǒng)在密集交通環(huán)境中的預(yù)測準(zhǔn)確程度,并提高運(yùn)算效率超過85%,為改善自動駕駛汽車的安全性提供巨大應(yīng)用潛力。
帶領(lǐng)研究團(tuán)隊的城大電腦科學(xué)系汪建平教授解釋,精確和實時預(yù)測在自動駕駛系統(tǒng)中極為重要,即使是微乎其微的延遲或錯誤,都可以導(dǎo)致災(zāi)難性的后果。
然而,目前的行車預(yù)測技術(shù)往往無法正確理解周圍的駕駛場景,又或缺乏預(yù)測效率。現(xiàn)有方案通常在車輛及其觀察視窗向前移動時,即使周邊物體的最新位置數(shù)據(jù)與其前一個位置重疊,系統(tǒng)仍需要為周圍的物體和環(huán)境的最新位置數(shù)據(jù),進(jìn)行重新歸一化(re-normalising)和重新編碼(re-encoding),這會令實時在線預(yù)測出現(xiàn)多余的運(yùn)算程序及導(dǎo)致延誤。
為了解決以上情況,汪教授的研究團(tuán)隊研發(fā)了一套名為“QCNet”的軌跡預(yù)測系統(tǒng),并可在理論上支持串流處理。這套系統(tǒng)基于相對時空(relative spacetime)的原理來進(jìn)行定位,有著包括“空間維度的旋轉(zhuǎn)平移不變性(roto-translation invariance)”與“時間維度的平移不變性(translation invariance)”等優(yōu)點。
透過上述提及的兩大特點,系統(tǒng)可在駕駛環(huán)境中提取唯一且固定的位置訊息,并不受駕駛者在查看駕駛場景時的時空座標(biāo)所影響。這讓系統(tǒng)可以存取和重用之前所計算的座標(biāo)編碼,理論上便可以做到實時預(yù)測。
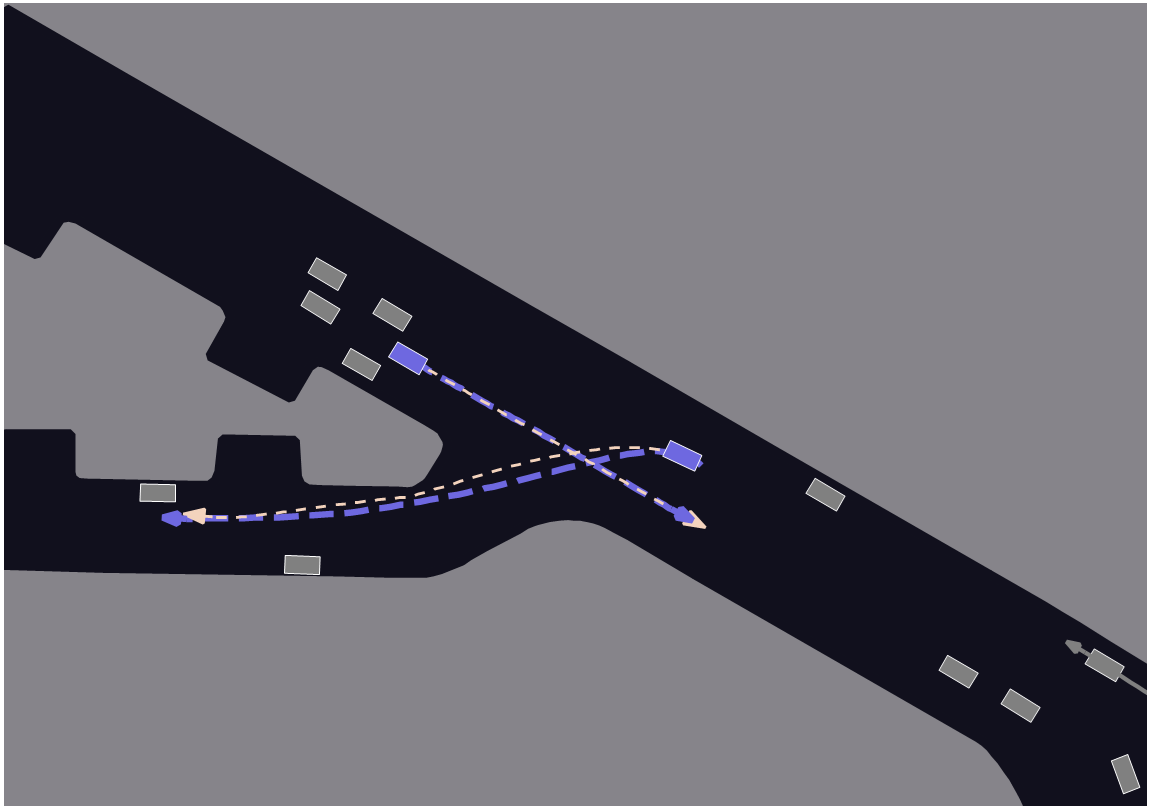
團(tuán)隊同時將道路使用者、車道和行人過路處之間的相對位置,整合至這套人工智能系統(tǒng)當(dāng)中,以捕捉他們與駕駛場景之間的相互關(guān)系和互動,有效增強(qiáng)系統(tǒng)對道路規(guī)則和道路使用者之間互動的理解,同時考慮道路使用者動向的不確定性,從而產(chǎn)生可避免車輛踫撞的預(yù)測。
為了評估QCNet的功效,研究團(tuán)隊使用了“Argoverse 1”和“Argoverse 2”兩套來自美國不同城市的自動駕駛開放數(shù)據(jù)和高清地圖數(shù)據(jù)庫進(jìn)行測試。兩大數(shù)據(jù)庫涵蓋了超過32萬個數(shù)據(jù)序列和25萬個駕駛場景,被認(rèn)為是對行為預(yù)測系統(tǒng)最具考驗難度的參照基準(zhǔn)。
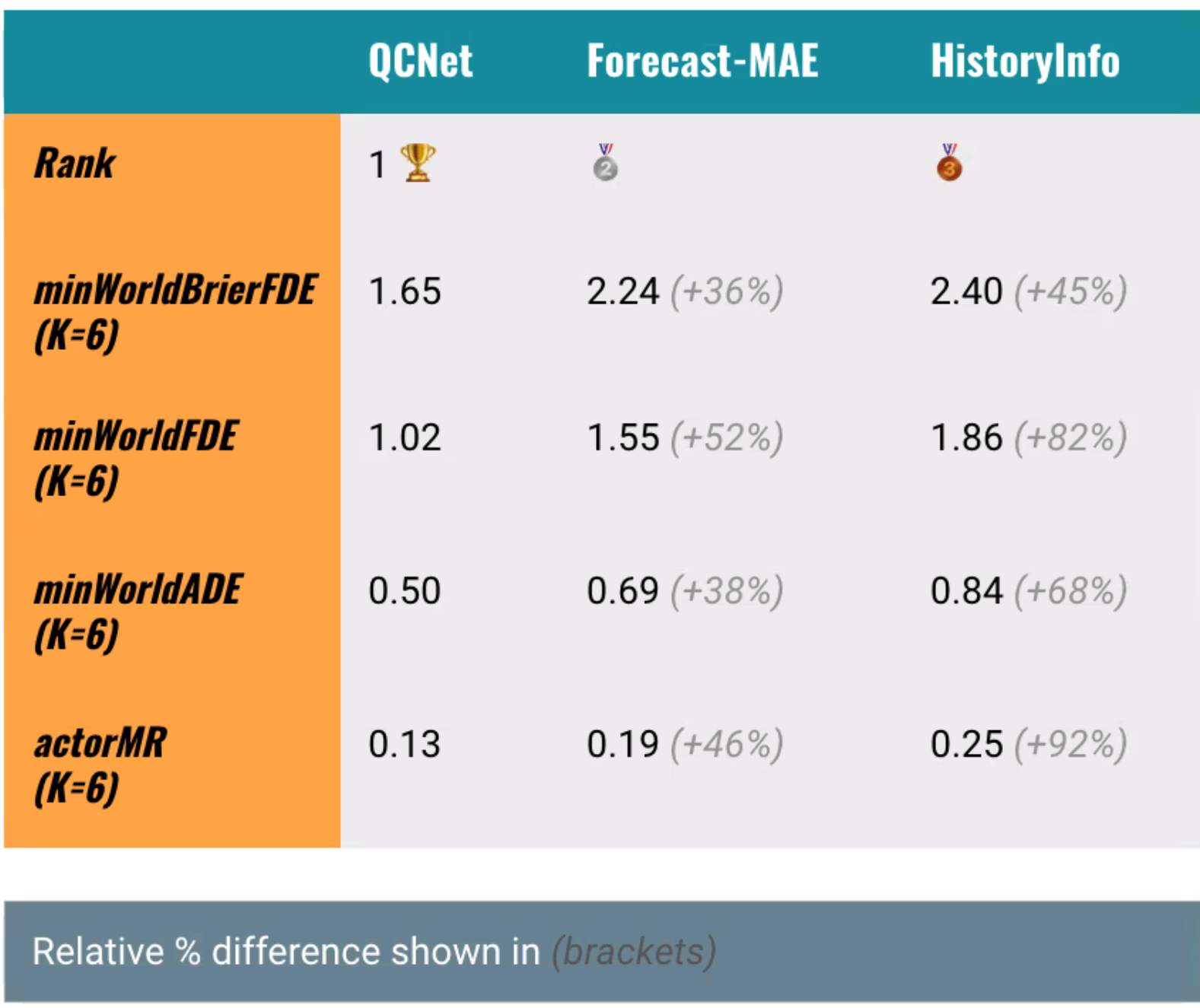
在測試當(dāng)中,QCNet即使在長遠(yuǎn)預(yù)測道路使用者六秒后的行為動向,仍能展示出一定的速度與高準(zhǔn)確性,并分別在Argoverse 1的333套預(yù)測系統(tǒng)與Argoverse 2的44套預(yù)測系統(tǒng)中位列第一。同時,QCNet在涉及190個道路使用者與169個地圖多邊形(map polygons,即包括車道和行人過路處) 的高密度交通場景之中,仍能將在線預(yù)測的延誤時間由八毫秒降至一毫秒, 令預(yù)測效率提高超過85%。
汪教授說:“團(tuán)隊研發(fā)的技術(shù)可應(yīng)用于自動駕駛系統(tǒng),令自動駕駛汽車更有效地理解周邊環(huán)境,更準(zhǔn)確地預(yù)測其他道路使用者的未來動向,以提供更安全、更人性化的駕駛決定,保障自動駕駛的安全性。”她補(bǔ)充說:“我們計劃將這套技術(shù)應(yīng)用在更多的自動駕駛范疇,包括模擬交通系統(tǒng)和產(chǎn)生人性化的決定。”
上述研究成果已于今年在加拿大舉行的電腦視覺(computer vision)年度學(xué)術(shù)會議——“IEEE / CVF電腦視覺與模式識別會議”(IEEE / CVF Computer Vision and Pattern Recognition Conference, CVPR 2023)上發(fā)表,題為〈Query-Centric Trajectory Prediction〉。

研究論文的第一作者是周梓康先生,他是汪教授在城大電腦科學(xué)系研究團(tuán)隊的博士生。通訊作者是汪教授,其他合作的研究人員分別來自鴻海科技集團(tuán)(Foxconn?)旗下的鴻海研究院,以及美國的卡尼基美隆大學(xué)(Carnegie Mellon University)。有關(guān)研究成果將整合至鴻海科技集團(tuán)旗下的電動車自動駕駛系統(tǒng),以提升實時預(yù)測效率和提高自動駕駛的安全性。
研究項目獲不同機(jī)構(gòu)支持,包括鴻海研究院、香港研究資助局和深圳市科技創(chuàng)新委員會資助。