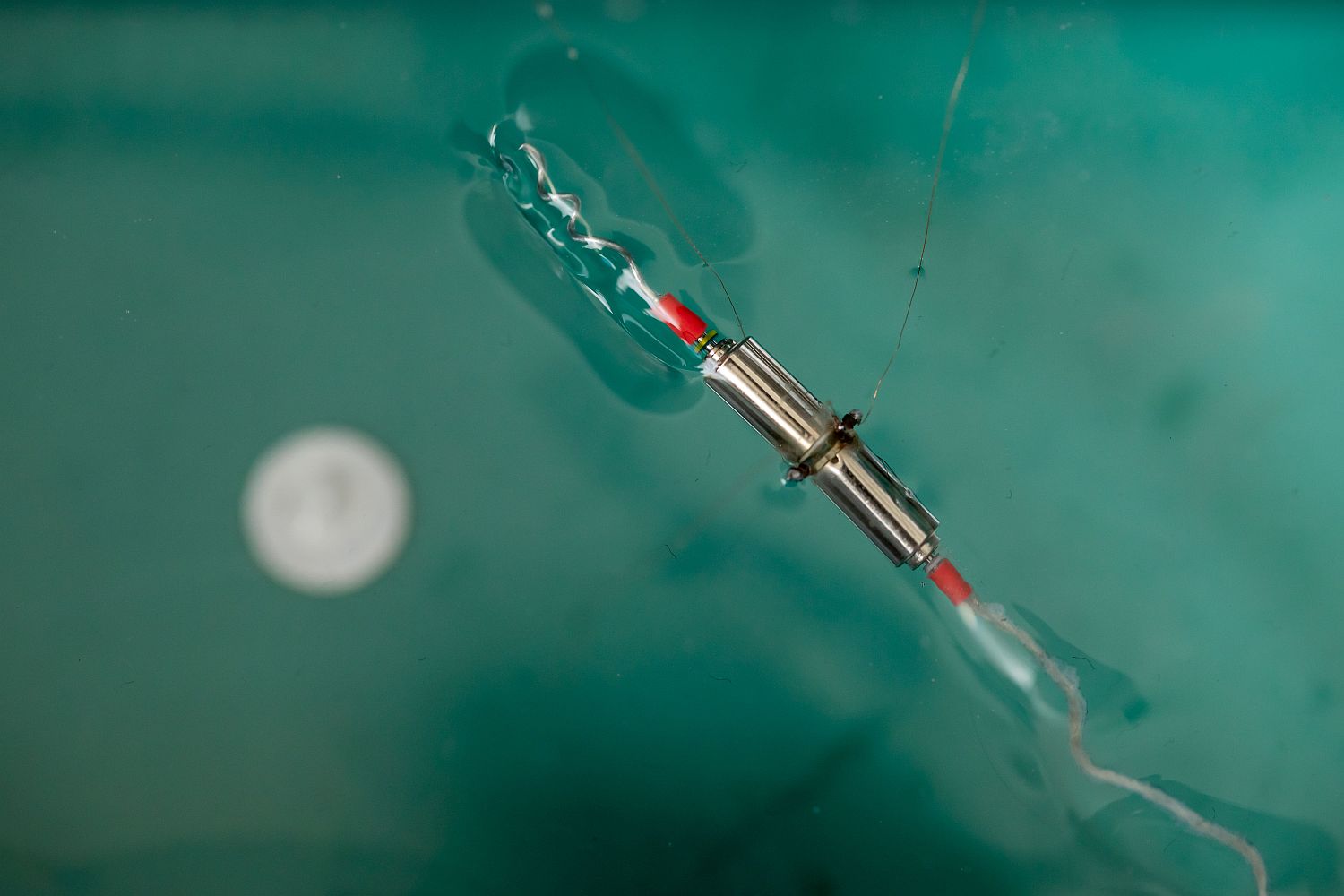
Heter-stiffness helical propulsion robot with adaptive energy allocation
Almost no existing robots can move across mud and swim in water. Our proposed heter-stiffness robot consists of a rigid spiral forepart and a soft helical tail. The rigid head moves better in a high viscosity solution, while the soft tail moves well in a dilute solution, demonstrating high environmental adaptability with a wide viscosity range. The proposed robot can also adapt to energy distribution to achieve more efficient motion. The miniature robot can move bi-directionally, allowing it to avoid obstacles under wireless control to achieve underwater detection/sample collection missions.
Team members
Mr Zhang Tieshan* (PhD, Dept. of Biomedical Engineering, CityU)
Dr Wang Panbing (Postdoc, Dept. of Biomedical Engineering, CityU)
Mr Miao Jiaqi (PhD, Dept. of Biomedical Engineering, CityU)
* Person-in-charge
Info. based on the team's application form
Dr Wang Panbing (Postdoc, Dept. of Biomedical Engineering, CityU)
Mr Miao Jiaqi (PhD, Dept. of Biomedical Engineering, CityU)
* Person-in-charge
Info. based on the team's application form
Achievement(s)
- CityU HK Tech 300 Seed Fund (2021)