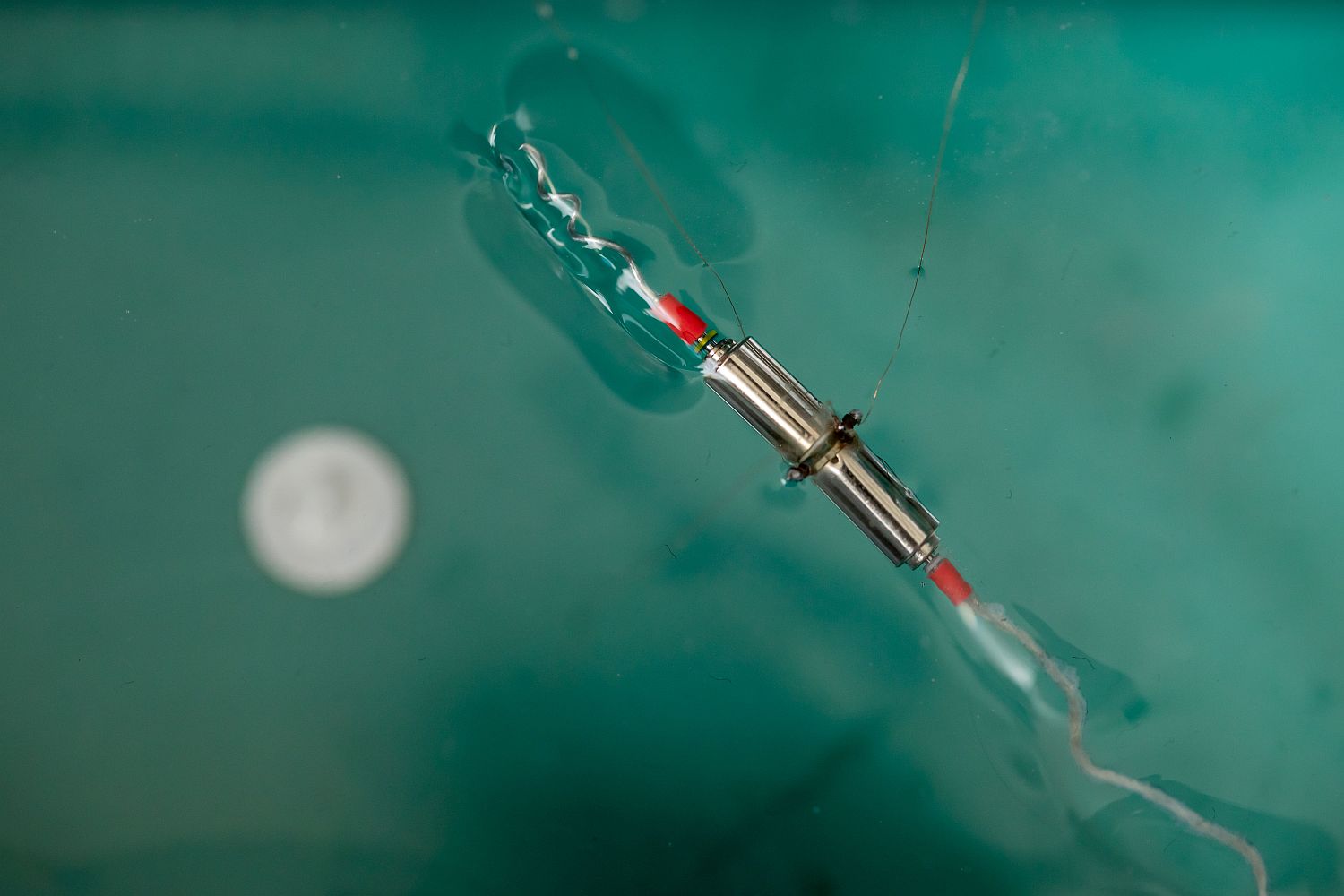
具有自適應能量分配的異質(zhì)剛度螺旋推進機器人
現(xiàn)有的機器人大多未能既可在泥地上移動,又能于水中游泳。本項目提出的機器人主要由剛性的螺旋前端和柔性的螺旋尾部組成︰剛性頭部在高粘度溶液中運動得較好,而軟尾在稀溶液中則有較好的驅(qū)動效果,令機器人在不同的粘度范圍內(nèi)具有較高的環(huán)境適應性。此外,該機器人能夠自適應地改變能量分布,實現(xiàn)更有效的運動,而且具有雙向運動能力,在無線控制下具有更佳的避障性能,能夠進行水下探測或采樣任務。
Team members
張鐵山先生* (香港城市大學生物醫(yī)學工程學系博士)
王盼冰博士 (香港城市大學生物醫(yī)學工程學系博士后)
苗佳麒先生 (香港城市大學生物醫(yī)學工程學系博士)
* 項目負責人
資料以隊伍遞交報名時為準
王盼冰博士 (香港城市大學生物醫(yī)學工程學系博士后)
苗佳麒先生 (香港城市大學生物醫(yī)學工程學系博士)
* 項目負責人
資料以隊伍遞交報名時為準
成就
- 香港城市大學HK Tech 300種子基金(2021)